1800 123 456
View in space
Couldn't load pickup availability
We are no longer producing this version of the OpenMV Cam. However, we'll keep the product webpage up for documentation purposes.
See our successor to the OpenMV Cam M4 V1, the OpenMV Cam N6 here.
The OpenMV Cam is a small, low power, microcontroller board which allows you to easily implement applications using machine vision in the real-world. You program the OpenMV Cam in high level Python scripts (courtesy of the Read more
The OpenMV Cam is a small, low power, microcontroller board which allows you to easily implement applications using machine vision in the real-world. You program the OpenMV Cam in high level Python scripts (courtesy of the MicroPython Operating System) instead of C/C++. This makes it easier to deal with the complex outputs of machine vision algorithms and working with high level data structures. But, you still have total control over your OpenMV Cam and its I/O pins in Python. You can easily trigger taking pictures and video on external events or execute machine vision algorithms to figure out how to control your I/O pins.
The OpenMV Cam features:
For more information, see our documentation.
Processor:
Supported Image Formats:
Maximum Supported Resolutions:
Lens Info:
Actual FoV with OV2640 image sensor:
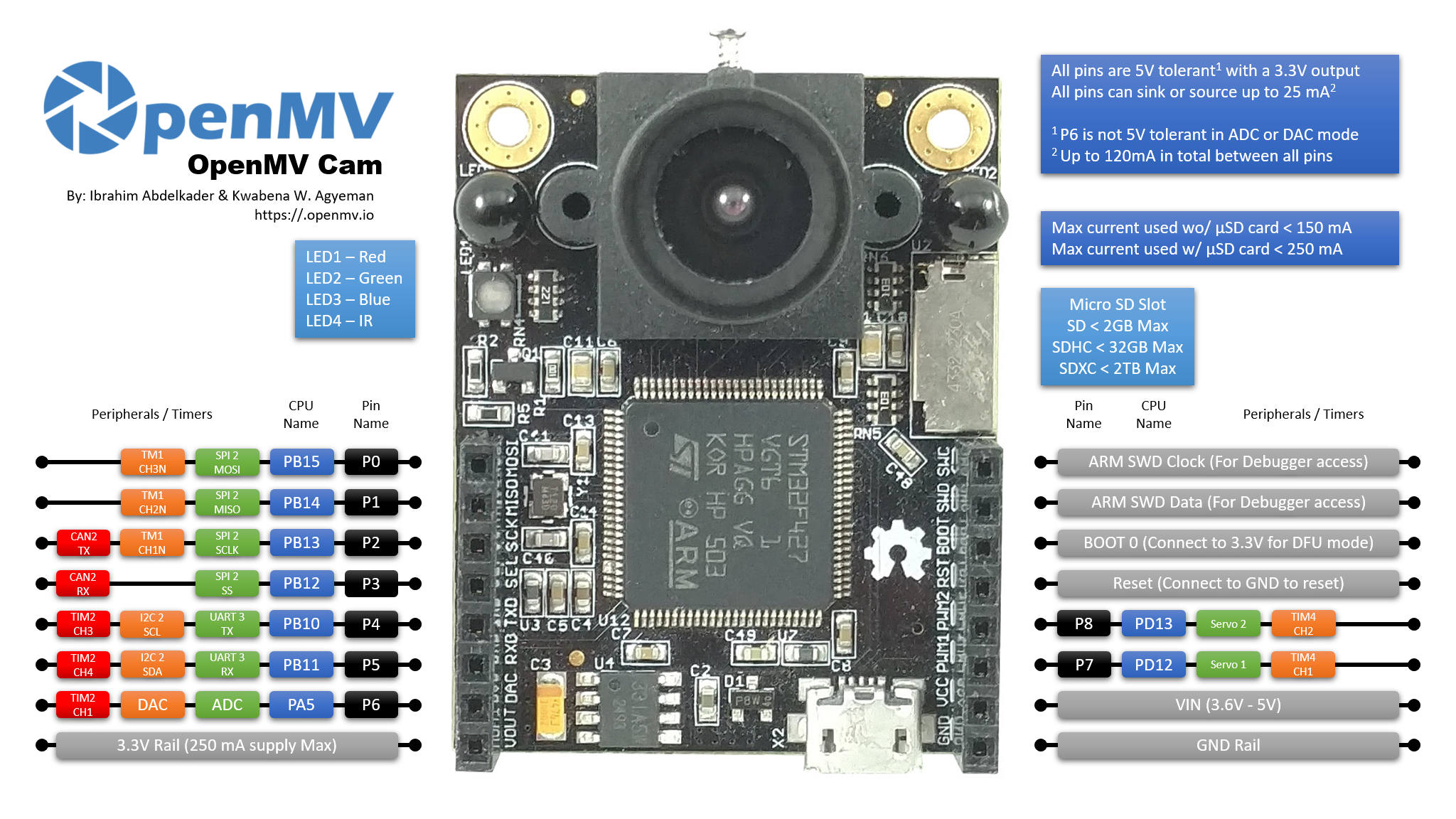
Electrical Info:
All pins are 5V tolerant with 3.3V output. All pins can sink or source up to 25mA. P6 is not 5V tolerant in ADC or DAC mode. Up to 120mA may be sinked or sourced in total between all pins. VIN may be between 3.6V and 5V. Do not draw more than 250mA from your OpenMV Cam's 3.3V rail.